
This section includes guidelines for collecting data under various sky conditions. The LAI-2200C can be operated in a range of daytime sky conditions, with appropriate adjustments in measurement and/or post-processing protocol.
Best Sky Conditions: Clear, blue sky (at least in the part of the sky viewed by the sensor) with the sun below the horizon (twilight) or blocked by a convenient cloud.
Good Sky Conditions: Clear blue sky (or a few high thin clouds) during sunlight hours. Interpolating above readings over time works well under these stable conditions, making tall canopies such as forests easy to measure with a single sensor. Direct sunlight greatly increases scattering errors, but this can be mitigated with scattering corrections. See Sun.
Other Sky Conditions: Most other sky conditions (such as broken or non-uniform clouds) can be problematic, and need to be handled carefully. You will need to minimize time differences between above and below readings, and carefully align above and below readings to view the same section of the sky. See Clouds.
Clouds
A very uniform overcast can be good, but scattered or non-uniform clouds represent the largest challenge for making measurements. The ideal LAI measurement involves above and below canopy readings that see exactly the same sky at exactly the same time. In practice, the sky brightness is always changing with time and/or view direction, and hence does cause variability (random errors) in the computed LAI, even without any canopy considerations.
Cloudless blue sky is by far the easiest case to deal with. It is stable, and small variations in view direction have little effect on a sensor’s reading. A sunlit cloud, however, can be many times brighter than the blue sky surrounding it, so slight variations in view direction can have significant effects if such a cloud extends across a particular ring’s view boundary. It is impossible to get exactly the same view multiple times if the optical sensor (wand) is moved between each one, so variations in the readings are unavoidable. It is equally impossible to get two separate sensors to have exactly the same view, since there are very slight variations in the angular response of each sensor. This section presents strategies for dealing with these challenges.
Sky Variability Tests
It is easy to quantify a set of sky conditions in terms of the potential error in LAI that it can produce. One method of doing this is to make a series of A readings of the sky. For example, mount a wand on a tripod and let it log an A reading every 10 seconds for 10 or 15 minutes. The FV2200 software has a sky test (Procedure 4.1 - Sky Variability Test) that will select all combinations of pairs of those readings, up to some specified maximum time separation, compute apparent LAI for each pair, then plot LAI as a function of time separation.
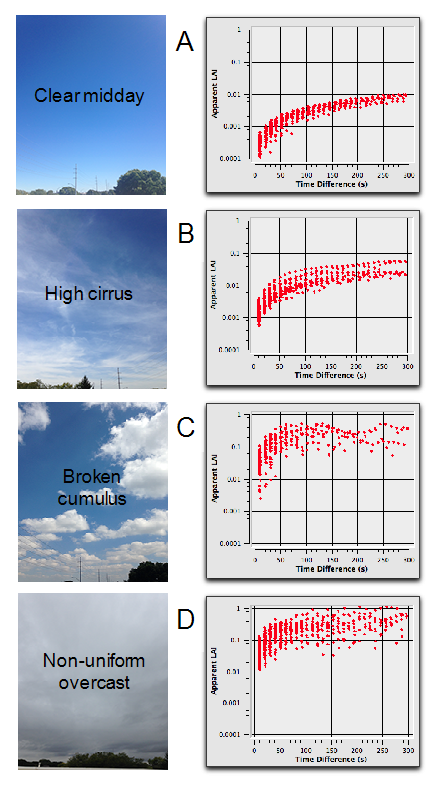
Figure E‑1 illustrates the results for four condition: A) Cloudless, midday. B) Cirrus. C) Broken cumulus, fairly windy. D) Heavy, non-uniform overcast. Each condition was measured with A readings logged every 10 seconds over about 30 minutes using a 45 degree view cap.
These examples illustrate the advantage of clear blue sky, with LAI error of < .01 for A readings taken up to 5 minutes apart. On the other extreme, rapidly changing clouds dictate readings as close together as possible.
Sky Variability and Canopy Variability
There is another aspect of variable sky brightness that will further increase the variability of LAI in a measurement, and that is the canopy itself. The parts of a canopy that block the brighter part (e.g. cloud) of a sensor’s view will be weighted more heavily than those that block the darker part of the view (e.g. blue sky).
Dealing with Clouds
The two ways to deal with the variability that clouds introduce are to 1) minimize the time between A and B readings, and 2) increase the number of B readings that you might otherwise take.
Timing
When there are clouds, the time between A and B readings in a short canopy can be minimized simply by taking an A reading before every B reading. In a tall canopy, that will not be practical with only one sensor. In two sensor mode, the time can be minimized by making the A readings more frequently. File sizes can be kept manageable by a simple trick: Set the A unit to log infrequently, say every 30 seconds. Once it starts logging, note what part of the minute (on the below unit’s clock) that the A unit logging takes place, and then only log B readings as close as possible to those times. For example, if the A unit is logging at 10 seconds and 40 seconds of each minute, then try to log B readings within a few seconds of those times. (Operational aside: autologging on an LAI-2200C wand is relative to the start time only if you enable autologging prior to that start time. Otherwise, it is relative to when you enable autologging. That’s why it is simpler to just wait and see what the timing actually is after it starts logging. It also saves you from having to synchronize clocks.)
Increase B Readings
With clouds in the sky, everywhere you would normally take one B reading, take several in quick succession, moving (view and position) just a little bit between each one.
In summary, clouds can be a problem in that they can introduce potentially large uncertainties into an LAI measurement unless you take steps to minimize the effect. By contrast, clear blue sky is easy to deal with. It, however, brings with it another problem: direct sunlight.