
Scattering corrections have some implications for multi-sensor operations, so read this section even if you think you are familiar with multi-sensor operation.
When two or more sensors are used to collect LAI data (e.g. one sensor collects above canopy A records, the other below canopy B records), two things have to happen to produce final LAI values:
- Combining: The A records and B records have to be combined into one file. Normally, some of the A records are inserted into the B file based on times of the B records.
- Matching: One of the record types (A or B) must have its values adjusted to account for calibration differences between the two wands.
While it is possible to do both combining and matching entirely on an LAI-2200C console, we highly recommend that you use the FV2200 software for both of these tasks instead. Here are the reasons:
- K records (i.e. 4A sequences, 3A sequences, etc.) should be done with a wand with factory calibration factors, not one matched to another sensor. FV2200 matching allows all wands to always use their factory calibration values. This allows any wand to be used for the K record precursors needed to do scattering corrections.
- Console matching is done with one snapshot reading, which is dangerous when there are clouds (see Sky Variability Tests). FV2200 matching is based on as many readings as you wish to average.
- FV2200 matching is not limited to two LAI-2200C wands, like console matching is: it can be used for any number of wands, including old (LAI‑2000) instrumentation.
- Collecting the data for FV2200 matching can be done anytime, not just at the time or place of data collection. This means you can collect matching data under the best sky conditions for matching (clear blue sky), and in a place with the best view of the sky (e.g. the roof of your building).
- FV2200 matching simplifies what needs to be done in the field, reducing the chances for errors.
- Once the relevant files are on your computer, FV2200 combining and matching can be done in one simple step.
Three Methods for FV2200 Matching
There are three variations you can use to do FV2200 matching. The method you choose will depend on the circumstances.
For this discussion, we will assume that there is a sensor (the A unit) that is to be used for logging A records in a clearing, and there is one (or more) B unit collecting below canopy B records. Note that either “unit” could be a) an autonomous wand, or b) an LAI‑2000 or LAI-2200C console and wand.
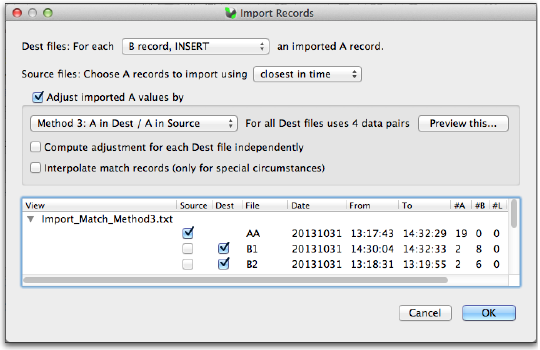
The three methods listed here are named for the setting in FV2200 that you would use to do the match while importing records. The FV2200 import dialog (Figure E‑4) lets you specify source files (the ones with A records), destination files (the ones with B records that need corresponding A records), and— when needed—match files (files that contain some or all of the information on how the sensors compare, so adjustments can be made to imported A records).
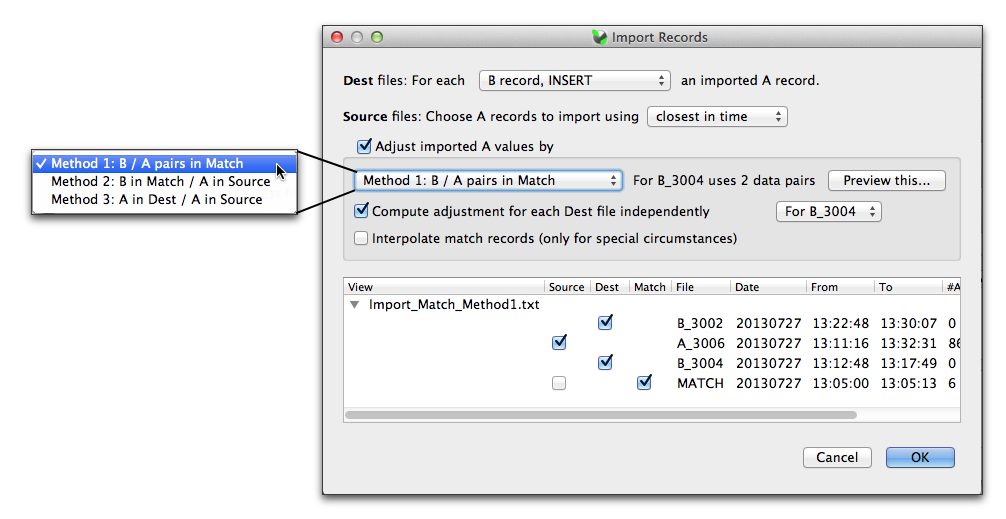
Method 1: B / A Pairs in Match
Method 1 is the recommended method for matching sensors. This method puts the match readings from both A and B units into one special file, known as a match file. This can be done before or after the measurements. If you are careful about keeping lenses cleaned, this file can be generated once and used over an extended period (weeks, months, etc.). When you have a calibration session, you might want to generate several files, one for each view cap you might use. You could name the files M45, M90, M180, for example, meaning they are for the 45, 90, and 180 degree view caps.
To make Match Method 1 file(s), follow the instructions under Procedure 1.8 - Build a Match File for Two Sensors (Match Method 1), or Procedure 1.9 - Build a Match File for More than Two Sensors (Match Method 1).
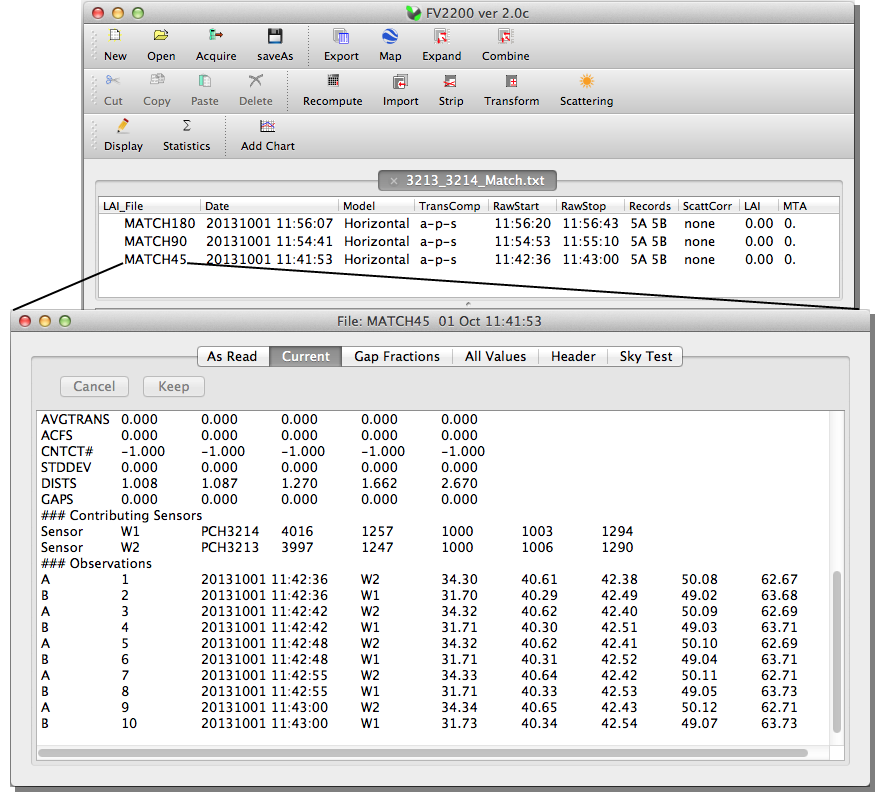
Figure E‑5 shows an example match data set for two sensors. The data reside in a file named 3213_3214_Match.txt, and contains three LAI files with match data for 3 view caps. Record types (A or B) in a match file don’t matter for LAI-2200C files, since sensor serial numbers are recorded in data files and are used by FV2200 when figuring out adjustment factors when importing records.
Procedure 3.8 - Import A and Adjust A Records - FV2200 illustrates how to do match file adjustments when importing A records.
The main advantage of Match Method 1 is that it eliminates all matching-related field work at the time of LAI data collection. Just collect your LAI data and you’re done; all the matching work has already been done. (Or will be done; your calibration session could also happen after the fact.)
The remaining two match methods involve collecting matching data at the time of regular data collection. If the sky is cloudless, then they can work as well as Method 1.
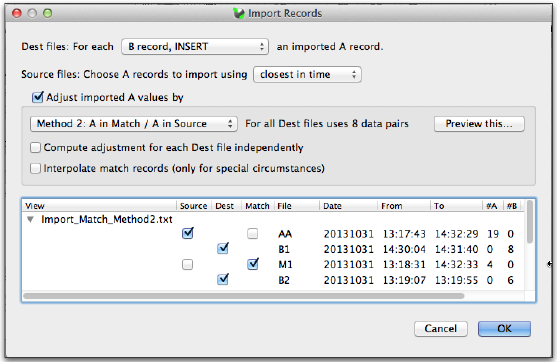
Method 2: B (or A) in Match / A in Source
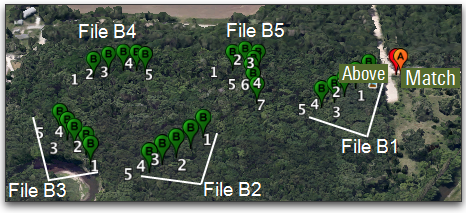
This method collects match data on-site, and creates a match file that contains only the below canopy sensor’s match readings; the corresponding above canopy sensor’s readings are in the above canopy file. The situation in which you might use this method is illustrated below: There is a clearing in which the A unit will reside, and a forest or other tall canopy in which one or more B units will log a series of files along transects or in plots.
- Set up the A sensor and start it logging in a clearing at regular intervals in the Above file.

- Before leaving the clearing, each B sensor makes a few matching measurements next to the A sensor. Log these into a file named "Match", or something to identify it as a match file.

- Each B unit goes off and collects multiple below canopy files. All have only B readings.
- (Optional) Upon returning to the clearing, append a few more readings into the Match file (or make a new match file), before shutting down the A unit.
- When importing the A records, use Match Method 2 to adjust the readings based on corresponding readings between the above file and the match file.
Method 3: A in Dest / A in Source
This method collects match data on-site, but does not use a separate match file. Instead, each B file contains its own match data, in that every B file contains at least one A record that can be used for matching. To make this work, it must be possible for each B unit to get to the A site and take at least one A record for each file it creates. If that is not practical, then use Methods 1 or 2 instead.
- Set up the A sensor and start it logging in a clearing at regular intervals in the Above file.

- Begin the first B file with an A record logged alongside the Above unit. Then go do the rest of the B records along the transect.
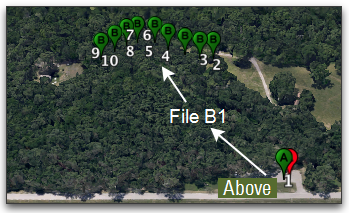
- (optional) You can then create other below files with only B records if you like.
- End the final below file with an A record logged beside the above unit.
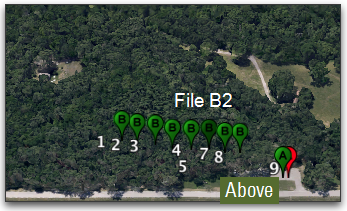
- For the below files with an A record (Files B1 and B2 in this example) analyze them with Match Method 3.
You can also combine methods 2 and 3: If you have at least one file done for method 3, you can use it (before importing A records) as the match file for files with only B records in them, using match method 2.
A potential advantage of Method 3 is that since you have an A record logged, you can compute an LAI estimate in the field based on that one reading (if it is done first, or if you pick the "closest in time" option for using A records). That way, if disaster strikes (e.g. a bear makes off with the A unit), you still have some results.
The obvious disadvantage is that you need to be able to access the A site or a suitable clearing for each B file. Also, like Method 2, it forces the matching to be done at the time and place of the measurement, and that may not result in the best match unless the sky is clear.